This post is an English version of my Japanese article on Zenn: NVIDIA NeMoを利用したGPT-OSSの学習
Introduction
I’m Kazuki Fujii from the Institute of Science Tokyo. This article explains how to train gpt-oss, released by OpenAI in August 2025, using the NVIDIA NeMo framework.
As of November 4, 2025, the official NVIDIA documentation only covers LoRA finetuning. If you want to do serious training such as long-context continual pre-training, there are many hurdles to overcome. This article documents detailed solutions for every problem you need to solve. I hope it helps anyone working on model training with gpt-oss.
gpt-oss
About
gpt-oss is an LLM released by OpenAI, available in two sizes: gpt-oss-20b and gpt-oss-120b. Both models demonstrate strong language capabilities in English, as shown below.
 Source: Artificial Analysis
Source: Artificial Analysis
However, their Japanese knowledge and language ability are limited, leaving room for improvement.
Q: Does this mean continual pre-training could be effective for improving Japanese capabilities?
Yes. However, enhancing Japanese ability without degrading gpt-oss’s strong English, math, code, and reasoning capabilities is far from trivial. Naively performing continual pre-training or SFT with Japanese data is likely to significantly harm the model’s existing strengths, so careful engineering is required.
Model Architecture
The gpt-oss architecture has several notable differences from recent open LLMs, which raise the barrier for training:
- Bias terms: Since Llama-2, most open LLMs have omitted bias terms in MLP and Attention layers. gpt-oss brings them back, similar to the GPT-2 era.
- No QK Norm: While recent LLMs like Qwen3 have adopted QK Norm for training stability, gpt-oss does not include it.
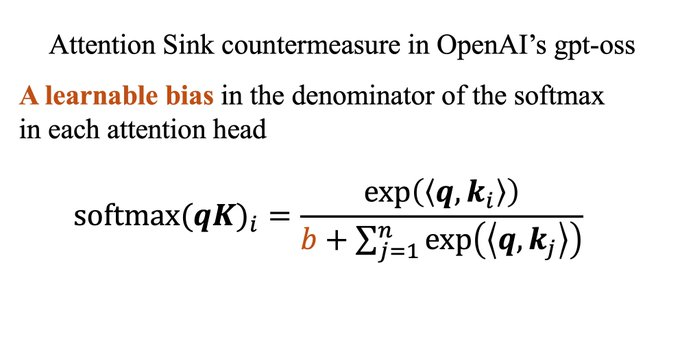
- Self-attention sink (learnable softmax): A learnable bias term is introduced in the denominator of the softmax function.
While these architectural changes are unlikely to have a major impact on model performance, the third point in particular causes significant problems during training.
Q: Where can I find details about the attention sink?
The gpt-oss-120b & gpt-oss-20b Model Card states: “Each attention head has a learned bias in the denominator of the softmax, similar to off-by-one attention and attention sinks.”
You can also confirm
self_attn.sinksin the model structure on HuggingFace.
Gro Kobayashi’s tweet is also a helpful reference.

Q: Why does the learnable softmax cause problems?
Modern LLM training doesn’t run on simple PyTorch implementations alone. It relies on FlashAttention, TransformerEngine’s FusedAttention, and Context Parallelism-aware custom GEMM implementations — most of which are written in C++ and CUDA C++.
A change that takes a few lines in PyTorch for small-scale experiments can trigger a chain of modifications across multiple dependency libraries when you need to maintain training speed at scale. The cost is fundamentally different from modifying code at the PyTorch level.
Q: How can I quickly verify the bias terms?
Compare the
model.safetensors.index.jsonfiles of Llama-3.1-8B and gpt-oss-20b. You’ll find that gpt-oss has additionaldown_proj_biasandgate_up_proj_biasentries in the MLP layers.


NGC
When looking into how to train gpt-oss, you’ll find the NVIDIA NeMo Framework User Guide, which introduces the 25.07.gpt_oss container. It makes training seem straightforward — and it is, for small-scale finetuning.
However, for long-context training or continual pre-training, things are not so simple. This section describes how to set up the training environment using NGC.
Extracting the Implementation
The following assumes work on a supercomputer using Singularity. Adapt the commands to your environment as needed.
First, create the 25.07.gpt_oss.def file and build with Singularity:
# 25.07.gpt_oss.def
Bootstrap: docker
From: nvcr.io/nvidia/nemo:25.07.gpt_oss
%post
pip install --no-cache-dir wandb transformers datasets jsonlines tqdm
I recommend building on local storage (e.g., /scratch) rather than Lustre or NFS to speed up the process.
cd /scratch
export SINGULARITY_TMPDIR=/scratch/tmp
singularity build --sandbox 25.07.gpt_oss 25.07.gpt_oss.def
We use a sandbox (not .sif) since we’ll need to modify files inside the container.
The NeMo and Megatron-LM implementations inside this container differ from the tagged versions on GitHub, so we extract them for version control:
singularity shell --bind /path/to/your:/path/to/your 25.07.gpt_oss
Singularity>
Copy the implementations to an external path:
cp -R /opt/NeMo /path/to/your
cp -R /opt/megatron-lm /path/to/your
I’ve published the modified Megatron-LM on GitHub — feel free to use it: okoge-kaz/gpt-oss-megatron-lm
Q: How did you locate the implementation inside the NeMo container?
The
dist-packagesdirectory didn’t provide useful clues. I launchedipythonand inspected the module paths:In [1]: import importlib.metadata as md, megatron.core, pathlib ...: print("version:", md.version("megatron-core")) version: 0.15.0rc0 In [2]: print("module file :", megatron.core.__file__) ...: print("module dir :", pathlib.Path(megatron.core.__file__).parent) module file : /opt/megatron-lm/megatron/core/__init__.py module dir : /opt/megatron-lm/megatron/core
Applying Fixes
As noted in this Pull Request, the container’s Megatron-LM implementation has a YaRN implementation that diverges from the HuggingFace version. The following files need to be patched:
Singularity> vim /opt/megatron-lm/megatron/core/models/common/embeddings/rope_utils.py
Singularity> vim /opt/megatron-lm/megatron/core/models/common/embeddings/yarn_rotary_pos_embedding.py
Singularity> vim /opt/megatron-lm/megatron/core/transformer/dot_product_attention.py
Singularity> vim /opt/megatron-lm/megatron/core/transformer/utils.py
The required diff is available here: Fix commit (GitHub)
Note: There is divergence between the original PR’s implementation and the container’s code, so you also need to account for API changes unrelated to the PR itself. Arriving at the correct diff took considerable effort.
NeMo
With the extracted NeMo under version control, we can start implementing.
Current State
Training gpt-oss with NeMo requires converting HuggingFace-format checkpoints to NeMo format.
Moreover, the included tutorial (tutorials/llm/gpt-oss/ticket-routing-lora/gpt-oss-lora.ipynb) only covers LoRA SFT, and nemo/collections/llm/recipes/gpt_oss_20b.py doesn’t support pretraining.
There’s still a long way to go — let’s tackle these one by one.
Q: Why is checkpoint conversion necessary?
Most models are distributed in HuggingFace format, which is easy to use but incompatible with high-performance training libraries like NVIDIA NeMo. Checkpoint conversion bridges this gap.
The diagram below illustrates the flow: convert gpt-oss-20b from HF format to NeMo format, train with Japanese/domain data, and convert back to HF format for distribution.

HF -> NeMo
The official documentation for the conversion script is frankly hard to follow. Here’s a straightforward script:
# experiments/ckpt-convert/hf-to-nemo/gpt-oss.py
import argparse
from nemo.collections import llm
if __name__ == "__main__":
parser = argparse.ArgumentParser(description="Convert HF GPT-OSS checkpoints to NeMo format.")
parser.add_argument("--model-size", type=str, choices=["20B", "120B"], required=True)
parser.add_argument("--hf-checkpoint-path", type=str, required=True)
parser.add_argument("--nemo-output-path", type=str, required=True)
args = parser.parse_args()
if args.model_size == "20B":
llm.import_ckpt(
model=llm.GPTOSSModel(llm.GPTOSSConfig20B()),
source="hf://" + args.hf_checkpoint_path,
output_path=args.nemo_output_path,
)
elif args.model_size == "120B":
llm.import_ckpt(
model=llm.GPTOSSModel(llm.GPTOSSConfig120B()),
source="hf://" + args.hf_checkpoint_path,
output_path=args.nemo_output_path,
)
print(f"Conversion complete! NeMo checkpoint saved at {args.nemo_output_path}")
Usage:
HF_CHECKPOINT_PATH="/path/to/gpt-oss-20b"
NEMO_OUTPUT_PATH="/path/to/checkpoints/hf-to-nemo/gpt-oss-20B.nemo"
mkdir -p $(dirname ${NEMO_OUTPUT_PATH})
export NUMEXPR_MAX_THREADS=192
singularity exec \
--nv \
--bind /path/to:/path/to \
--bind /tmp:/tmp \
/path/to/25.07.gpt_oss.sif \
python experiments/ckpt-convert/hf-to-nemo/gpt-oss.py \
--model-size 20B \
--hf-checkpoint-path ${HF_CHECKPOINT_PATH} \
--nemo-output-path ${NEMO_OUTPUT_PATH}
pretrain_recipe
The recipe files gpt_oss_20b.py and gpt_oss_120b.py only include a finetune recipe:
@run.cli.factory(target=finetune, name=NAME)
def finetune_recipe(
dir: Optional[str] = None,
resume_path: str = "openai/gpt-oss-20b",
name: str = "default",
num_nodes: int = 1,
num_gpus_per_node: int = 8,
peft_scheme: Optional[str] = "lora",
packed_sequence: bool = False,
) -> run.Partial:
We need to implement a pretrain recipe. Here’s an example (can be simplified depending on your needs):
@run.cli.factory(target=pretrain, name=NAME)
def pretrain_recipe(
dir: Optional[str] = None,
name: str = "default",
num_nodes: int = 1,
num_gpus_per_node: int = 8,
tensor_parallel_size: int = 1,
context_parallel_size: int = 1,
expert_parallel_size: int = 1,
pipeline_parallel_size: int = 1,
sequence_parallelism: bool = False,
seq_length: int = 32768,
global_batch_size: int = 256,
micro_batch_size: int = 1,
lr: float = 3e-4,
min_lr: float = 3e-5,
train_steps: int = 25000,
warmup_steps: int = 1000,
fp8: str = "",
fn: Callable = pretrain,
) -> run.Partial:
recipe = run.Partial(
fn,
model=model(),
trainer=trainer(
num_nodes=num_nodes,
num_gpus_per_node=num_gpus_per_node,
tensor_parallelism=tensor_parallel_size,
context_parallelism=context_parallel_size,
pipeline_parallelism=pipeline_parallel_size,
sequence_parallelism=sequence_parallelism,
expert_parallel_size=expert_parallel_size,
fp8=fp8,
callbacks=[run.Config(TimingCallback, log_tokens_per_sec=True)],
),
data=run.Config(MockDataModule, seq_length=seq_length,
global_batch_size=global_batch_size, micro_batch_size=micro_batch_size),
log=default_log(dir=dir, name=name, tensorboard_logger=tensorboard_logger(name=name)),
optim=distributed_fused_adam_with_cosine_annealing(
train_steps=train_steps, warmup_steps=warmup_steps,
max_lr=lr, min_lr=min_lr,
),
resume=default_resume(),
)
And the trainer() function:
def trainer(
tensor_parallelism: int = 1,
pipeline_parallelism: int = 1,
context_parallelism: int = 2,
expert_parallel_size: int = 4,
sequence_parallelism: bool = False,
num_nodes: int = 1,
num_gpus_per_node: int = 8,
max_steps: int = 1168251,
fp8: str = "",
callbacks: Optional[list[run.Config[Callback]]] = None,
) -> run.Config[nl.Trainer]:
strategy = run.Config(
nl.MegatronStrategy,
tensor_model_parallel_size=tensor_parallelism,
pipeline_model_parallel_size=pipeline_parallelism,
context_parallel_size=context_parallelism,
expert_model_parallel_size=expert_parallel_size,
sequence_parallel=sequence_parallelism,
gradient_as_bucket_view=True,
ckpt_async_save=True,
ckpt_parallel_load=True,
ddp=run.Config(
DistributedDataParallelConfig,
check_for_nan_in_grad=True,
grad_reduce_in_fp32=True,
overlap_grad_reduce=True,
overlap_param_gather=True,
average_in_collective=True,
data_parallel_sharding_strategy="optim_grads_params",
),
)
precision = bf16_mixed()
if fp8 == "current":
precision = nemotron_h_bf16_with_fp8_current_scaling_mixed()
elif fp8 == "blockwise":
precision = bf16_with_fp8_subchannel_scaling_mixed()
return run.Config(
nl.Trainer,
accelerator="gpu",
devices=num_gpus_per_node,
max_steps=max_steps,
num_nodes=num_nodes,
plugins=precision,
strategy=strategy,
callbacks=callbacks,
use_distributed_sampler=False,
val_check_interval=2000,
log_every_n_steps=1,
)
Details such as WandB logger callbacks, Megatron-LM-compatible checkpoint paths, and dataset configuration are omitted here for brevity.
The Remaining Blocker
At this point, you’d hope training would work — but it doesn’t. The installed FlashAttention and TransformerEngine don’t support DotProductAttention with gpt-oss’s learnable softmax, so Context Parallelism is unavailable and the trainable context size is limited to around 8,192 tokens.
Setting context_parallel_size > 1 results in:
ValueError: No dot product attention backend is available for the provided inputs.
Please run with NVTE_DEBUG=1 NVTE_DEBUG_LEVEL=2 to find out the reasons.
With debug flags enabled:
[DEBUG | DotProductAttention]: Disabling FlashAttention for softmax_type = learnable
[DEBUG | DotProductAttention]: Available backends = {
FlashAttention=False, FusedAttention=False, UnfusedDotProductAttention=False
}
[DEBUG | DotProductAttention]: Selected backend = NoBackend
All three backends are disabled — hence the error.
Updating TransformerEngine
Rather than implementing learnable softmax support from scratch, I investigated whether NVIDIA’s TransformerEngine team had already done it. I found TransformerEngine PR #2148, which adds FusedAttention support for learnable softmax with a2a (all-to-all) Context Parallelism.
The fix: update TransformerEngine inside the sandbox to this version.
Q: Is updating TransformerEngine sufficient?
No. You also need to add the following to
GPTOSSConfiginnemo/collections/llm/gpt/model/gpt_oss.py:attention_backend: AttnBackend = AttnBackend.fused cp_comm_type: str = "a2a"This forces the use of FusedAttention (which supports learnable softmax) and sets the Context Parallel communication type to
a2ainstead of the defaultp2p.Without these settings:
[DEBUG | DotProductAttention]: Disabling FusedAttention for context parallelism with softmax_type = learnable and cp_comm_type = p2p
Updating cuDNN
Still not working. The debug output shows:
[DEBUG | DotProductAttention]: Disabling FusedAttention as no backend supports the provided input
Tracing this message to fused_attn.cpp#L373-L376 reveals that cuDNN version 9.13.1+ is required, but the container ships with 9.13.0.
The PR description confirms:
FusedAttention backend for FP16/BF16 and BSHD/SBHD: cuDNN 9.13.1+ and cudnn-frontend 1.14.1
Solution
Since PyTorch and TransformerEngine load cuDNN as a shared library, we can simply bind a newer cuDNN into the container at runtime — no rebuild needed:
CUDNN_ROOT="/path/to/cudnn/cudnn-linux-x86_64-9.14.0.64_cuda12-archive"
singularity exec --nv .... \
--bind ${CUDNN_ROOT}/lib:/usr/local/cudnn/lib64:ro \
--bind ${CUDNN_ROOT}/include:/usr/local/cudnn/include:ro \
/path/to/container/25.07.gpt_oss.fix.sif \
With all these changes, continual pre-training of GPT-OSS with context length 32k and context parallel size = 4 is finally possible.
 Training loss during continual pre-training
Training loss during continual pre-training
Don’t forget to convert the modified sandbox to
.sif:singularity build 25.07.gpt_oss.sif 25.07.gpt_oss
Conclusion
This article covered the end-to-end process of training gpt-oss with NeMo. While LLM training may seem glamorous from the outside, the reality is that it’s fundamentally a software engineering challenge — the implementation hurdles far outweigh what’s typically described in papers.
As the HuggingFace smol-training-playbook puts it:
The reality is messier, more iterative, and full of decisions that don’t make it into the final paper.